 Control
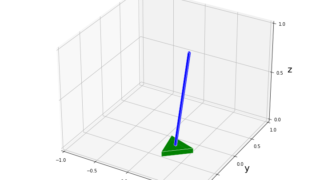
Control オムニロボ + 倒立振子システムをpythonでアニメーション描画する
はじめに
今回 python でアニメーションを作成する方法をリサーチするにあたって気づきましたが、意外とこういう題材を扱っている記事は少ないみたいです。おそらく制御工学を本業でやっている研究者の方や学生さんは matlab を使う...
Control  Control
Control  Control
Control  Robot
Robot  Robot
Robot  Robot
Robot  Robot
Robot  Robot
Robot