 Electronics
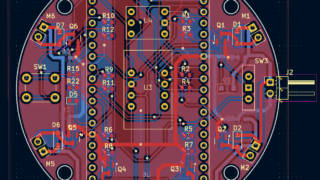
Electronics ドローン制作 2-8: PCB 再設計(IMU・昇圧コンバータのモジュール化)
こちらの記事で言及しましたが、昇圧後の電圧が不安定で前回設計した基板は正常動作しませんでした。
今回の設計では、以下の改変を行います。
ピンソケットを使い、直接 ToF センサと optical flow センサをマウントする...
Electronics  Electronics
Electronics  ROS
ROS  ROS
ROS  Electronics
Electronics 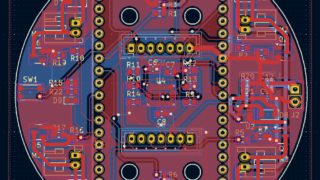 Electronics
Electronics  Electronics
Electronics  Electronics
Electronics  Electronics
Electronics  ROS
ROS