ブレッドボードで試験して,それなりの出力が出ていることを確かめたので,いよいよ基板に起こしていこうと思います.今回はユニバーサル基板を使います.
回路図
冒頭に乗せた動画の回路をfritzingでブレッドボードの回路図に起こしてみると,以下のようになります.
※(追記:2020/8/19)VccとGNDがつながっている回路図になっていたので慌てて直しました.
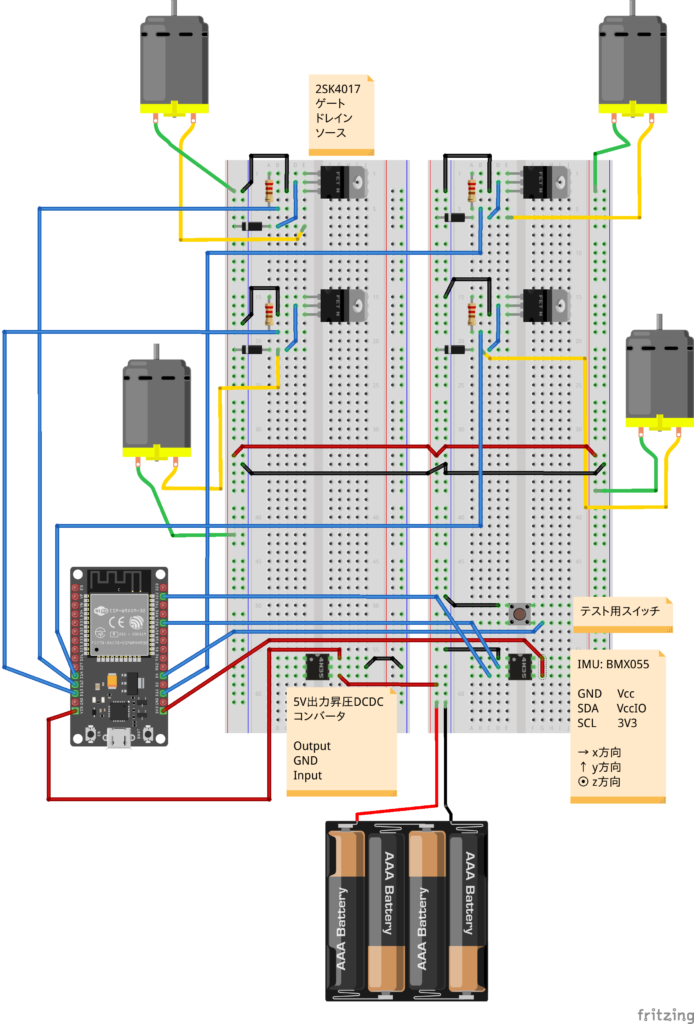
おおざっぱに言うと,必要な機能は以下になります.
- Nch MOSFETトランジスタでモータ用に電流増幅をする.(esp32マイコンでは,電流はMAXでも40 mAしか出ないので,モータで必要な電流(100 mA以上)は流せない.)
- 非常停止用・テスト用として,スイッチをつけておく.
- IMUセンサから機体の姿勢角を算出する.
- 昇圧モジュールで電源の安定化をする.
ありがたいことに,esp32ではBLE無線通信機能が備わっているので,回路の構成はそれなりに単純でよいのです.たとえばArduinoで組むなら,無線通信用のモジュールを別途で用意しなければなりませんね.
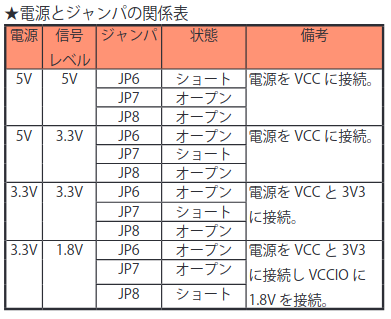
esp32の場合3.3V出力なので,BMX055ではJP7をショートさせて,電源をVccと3V3につなぎます.詳しくは以下をご覧ください.
http://akizukidenshi.com/download/ds/akizuki/AE-BMX055_20180403.pdf
部品
使う部品は以下です.
| マイコン | 1個 | esp32(DOIT ESP32 DEVKIT) |
| 電源 | 4個 | 充電式EVOLTA 1.2V 単3 |
| 電池ボックス | 1個 | 単3 x 4 |
| Nch MOSFETトランジスタ | 4個 | 2SK4017 |
| IMU(加速度・ジャイロセンサ) | 1個 | BMX055 |
| ダイオード | 4個 | 整流ショットキーダイオード |
| 抵抗 | 4個 | カーボン抵抗 150 Ω |
| 昇圧モジュール | 1個 | 5V出力昇圧 DCDCコンバーター |
| スイッチ | 1個 | タクトスイッチ |
| ユニバーサル基板 | 1個 | 両面ユニバーサル基板 45 x 45 mm |
| モータ | 4個 | ドローン用小型ブラシモータ BETAFPV 8mmx20mm 15000KV |
今回は,EVOLTAからの有線給電でドローンを飛ばす予定です.リポバッテリは初心者には危なそうなので,もう少し電気回路について理解を深めてから手を出したいと思います.
MOSFETトランジスタは,3種類を以下の記事で選定しましたが,最終的にトランジスタのサイズを考えて2SK4017を使うことにしました.
参考までに,1つのモータのみを回転させたときの最大出力電流は以下のようになりました.
| 2SK703 | 1 A |
| 2SK2796L | 860 mA |
| 2SK4017 | 800 mA |
回路を組む上での注意事項
注意点は,以下のサイトを参考にさせていただきました.


ゲートとesp32の間に抵抗(150 Ω)を挟む
瞬間的に大きな電流が流れてしまうため,抵抗を挟んでおいた方がよいみたいです.
マイコンの出力ピンと、MOS-FETのゲートピンは直接つないでもいいのですが、瞬間的に大きな電流が流れてしまうため100Ω程度の抵抗を入れておいた方がいいです。
https://kohacraft.com/archives/1048634380.html
esp32の入力電圧を5Vにする
esp32の入力電圧が下がってしまうと,動作が不安定になってしまうことがあります.実際に,ブレッドボードでテストしているときに,おそらくこれが原因で制御不能になってしまうことが何度かありました.
これを防ぐため,5V出力昇圧コンバータでesp32への電圧を安定化させています.これは,モータの電源とesp32への入力電圧を別系統にしていることになります.以下の問題に対して,昇圧コンバータで対策したということになります.
さらに、モーターは回転時に瞬間的に数Aの電流が流れます。マイコンの電源にモーターをつなぐと、モーターが回転する瞬間に大きな電流が流れてマイコンに電気が行かなくまります。マイコンに電気が行かないと正しくプログラムが動かなくなるため、マイコン用とモーター用で電源を別にします。
https://kohacraft.com/archives/1048634380.html
ダイオードをモータと並列につなぐ
この記事で紹介していますが,急激な逆起電力の発生を防ぐためにダイオードとモータを並列につなぎます.
モータ電源は,電源投入後につなげるように回路を組む
この記事で紹介しているとおり,起動処理が完了するまでは端子から出る電流値は不定なので,起動処理が完了してからモータ用に電源を供給できるようにユニバーサル基板の回路の構成も工夫します.
※(追記:2020/8/22)赤い導線をさしたときに,モータ用電源が供給されるようにしました.
プロペラとモータに関して備忘録
モータの回転方向と,制御に関しては以下の記事でまとめています.

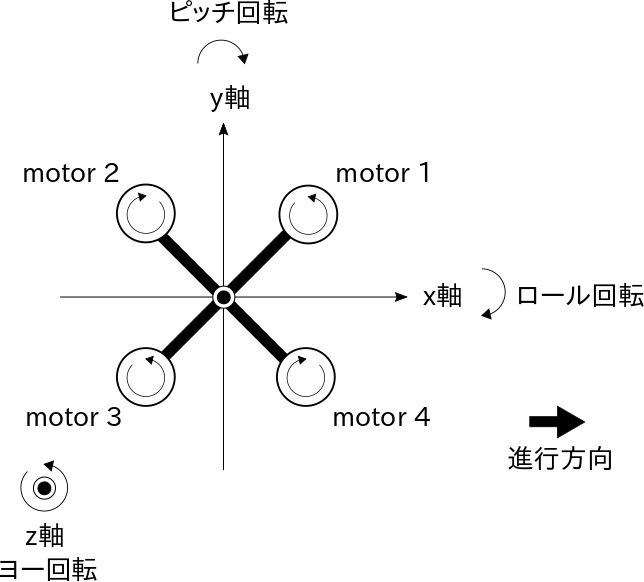
私が購入したモータとプロペラの回転方向の対応表は以下のようになります.
| コードの色 | 回転方向 | プロペラ種別 | 上図のモータとの対応 |
| 青赤 | 時計回り | A1 | motor 2, motor 4 |
| 白黒 | 反時計回り | B1 | motor 1, motor 3 |
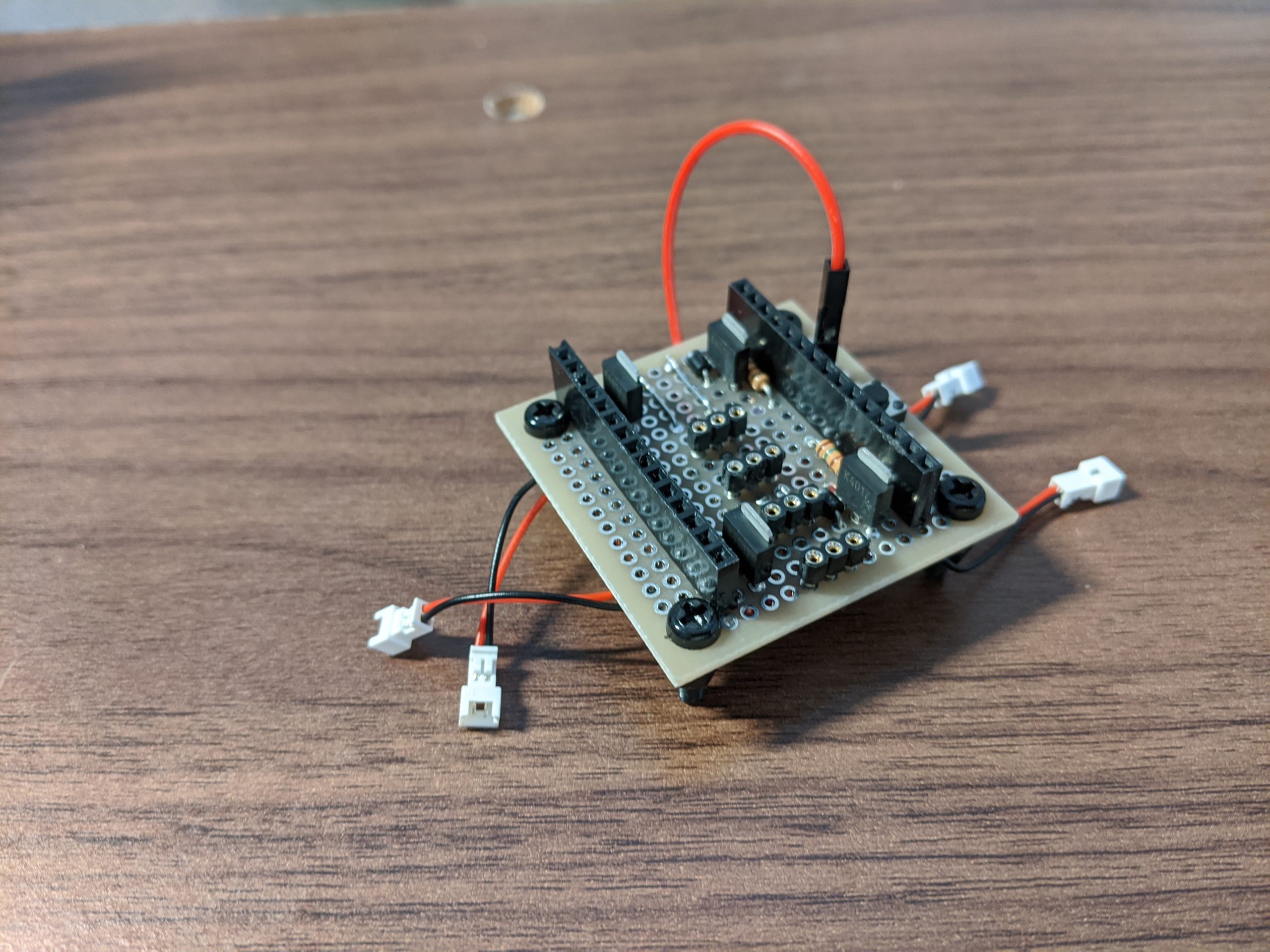
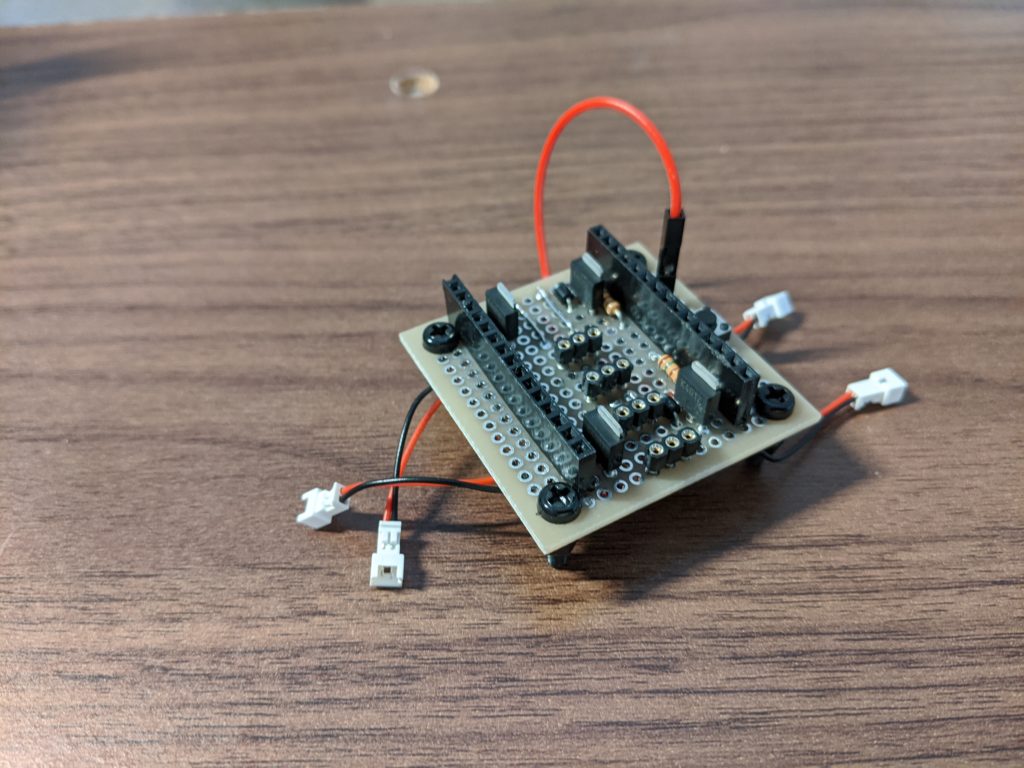
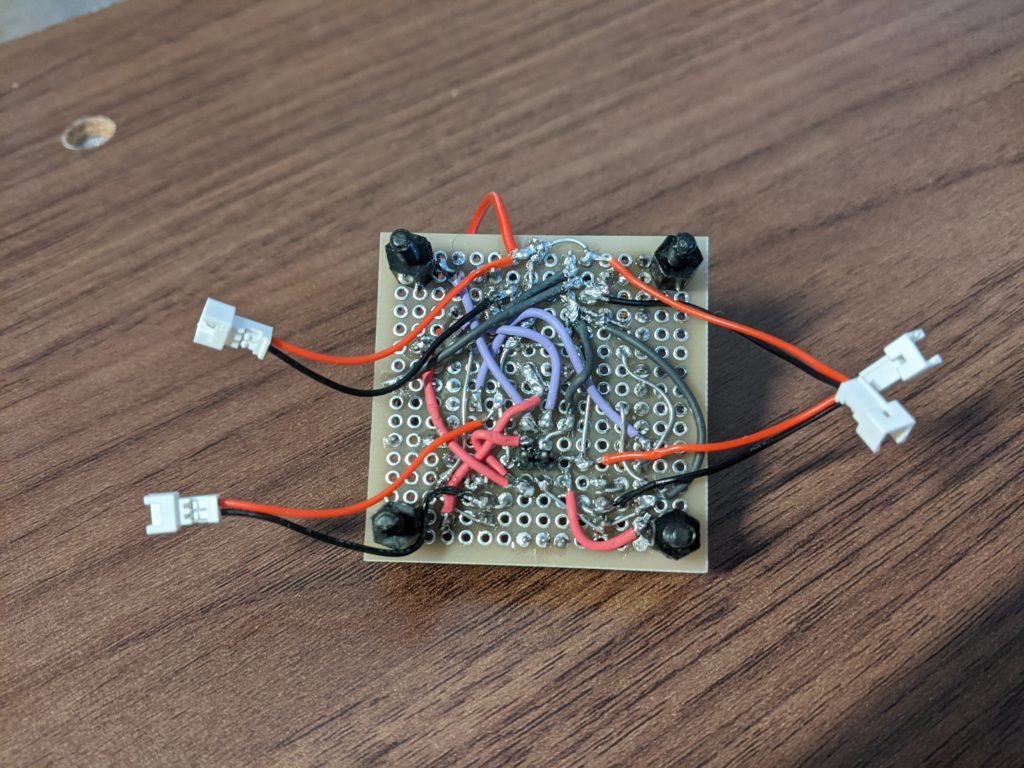
(追記:2020/8/22)完成図
裏面の配線を貼っておきます.我ながらきたないです…
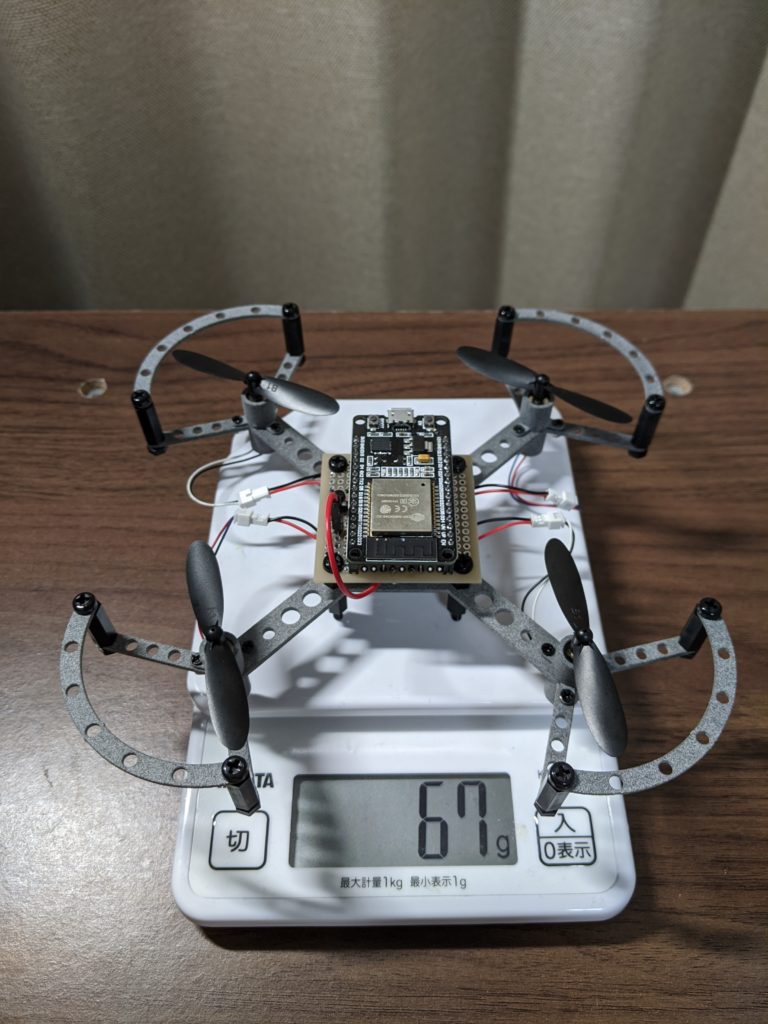
ドローンの完成写真は以下です.デザインは結構気に入っています.機体重量67g,そのうち基板重量は27gでした.
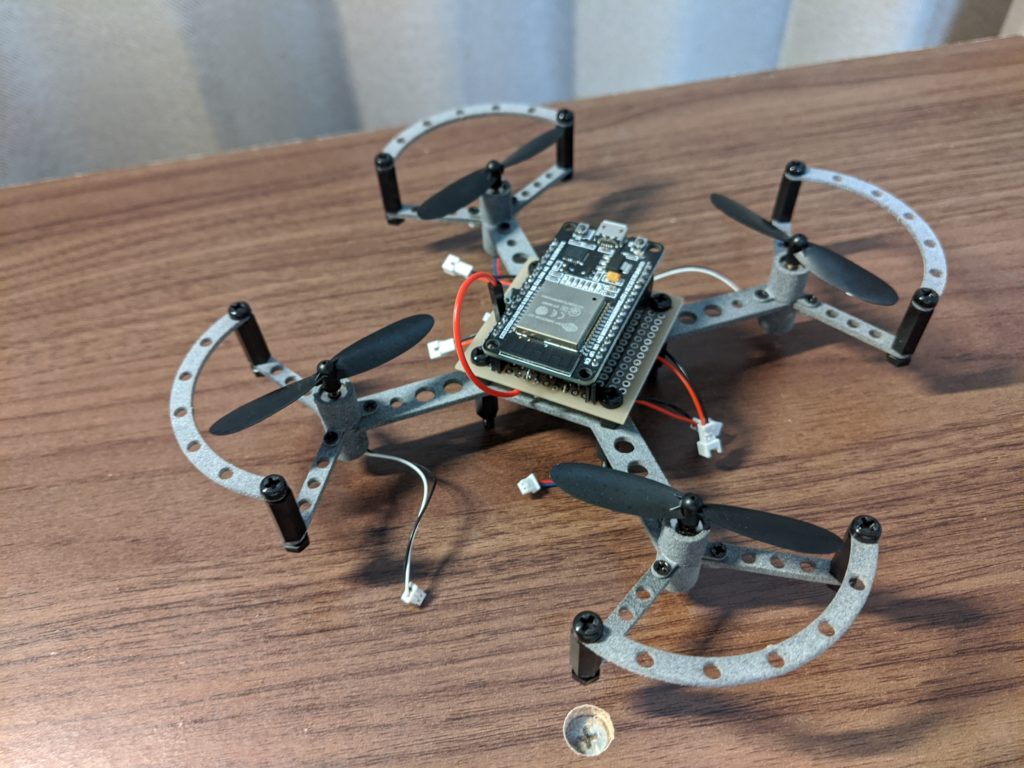
ただ,悲しいことに推力不足なのかドローンは飛びませんでした…なんとか飛ぶように改造したいと思っています.


コメント